Machine Vision
OpenCV Python: Thresholding for Green Object Detection
Learn how to use Python and OpenCV to set a threshold value for isolating and detecting only green colored objects within any image.
Learn how to use Python and OpenCV to set a threshold value for isolating and detecting only green colored objects within any image.

This article provides a step-by-step guide on how to detect green objects in an image using OpenCV in Python. We'll cover loading the image, converting it to the HSV color space, defining color ranges, creating a mask, finding contours, and drawing bounding boxes around the detected objects.
import cv2
import numpy as npimage = cv2.imread('image.jpg')hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)HSV is often preferred for color detection as it separates color information (Hue) from saturation and value, making it less sensitive to lighting variations.
lower_green = np.array([30, 50, 50])
upper_green = np.array([90, 255, 255])These values can be adjusted based on the specific shade of green you want to detect. You can use tools like color pickers or online HSV calculators to find appropriate ranges.
mask = cv2.inRange(hsv, lower_green, upper_green)cv2.inRange() creates a binary mask where pixels within the specified HSV range are white (255) and others are black (0).
contours, hierarchy = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)This step identifies the outlines of the detected green regions.
for contour in contours:
if cv2.contourArea(contour) > 100: # Filter out small contours
x, y, w, h = cv2.boundingRect(contour)
cv2.rectangle(image, (x, y), (x + w, y + h), (0, 255, 0), 2)This loop draws a green rectangle around each detected green object in the original image. The cv2.contourArea() check helps to ignore small, potentially noisy detections.
cv2.imshow('Green Detection', image)
cv2.waitKey(0)
cv2.destroyAllWindows()This will show the image with green objects highlighted.
The Python code detects green objects in an image. It loads the image, converts it to HSV color space, and creates a mask to isolate green areas. Then, it finds contours in the mask and draws bounding boxes around large enough contours, effectively highlighting the detected green objects in the original image. Finally, it displays the image with the detected green objects.
import cv2
import numpy as np
# Load the image
image = cv2.imread('image.jpg')
# Convert the image from BGR to HSV color space
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# Define the lower and upper bounds for green color in HSV
lower_green = np.array([30, 50, 50])
upper_green = np.array([90, 255, 255])
# Create a mask for green color by thresholding the HSV image
mask = cv2.inRange(hsv, lower_green, upper_green)
# Find contours in the mask
contours, hierarchy = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# Iterate through the contours and draw bounding boxes around them
for contour in contours:
if cv2.contourArea(contour) > 100: # Filter out small contours
x, y, w, h = cv2.boundingRect(contour)
cv2.rectangle(image, (x, y), (x + w, y + h), (0, 255, 0), 2)
# Display the result
cv2.imshow('Green Detection', image)
cv2.waitKey(0)
cv2.destroyAllWindows()Explanation:
cv2.imread(). Make sure to replace 'image.jpg' with the actual path to your image file.cv2.cvtColor().cv2.inRange(). The mask will have white pixels where the image falls within the green range and black pixels elsewhere.cv2.findContours().cv2.contourArea(). If the area is larger than 100 pixels (to filter out small noise), it calculates the bounding rectangle of the contour using cv2.boundingRect() and draws a green rectangle on the original image using cv2.rectangle().This code provides a basic example of green object detection using OpenCV in Python. You can modify and extend it further based on your specific requirements, such as detecting different colors, tracking objects, or performing more advanced image analysis.
Adjusting Color Sensitivity: The lower_green and upper_green arrays define the range of HSV values considered "green." You can fine-tune these values to detect specific shades of green more accurately. Experiment with different ranges to suit your target color.
HSV Color Space: Converting the image to HSV (Hue, Saturation, Value) is crucial. HSV represents colors in a way that aligns better with human perception. Hue represents the pure color, Saturation indicates the color's intensity, and Value represents its brightness. This separation makes color detection less sensitive to lighting variations compared to using the RGB color space directly.
Contour Filtering: The code includes if cv2.contourArea(contour) > 100: to discard small contours. This helps eliminate noise and focus on detecting significant green regions. Adjust the threshold (100 in this case) based on the expected size of the green objects in your images.
Real-World Applications: This green object detection technique has various practical uses, including:
Morphological Operations: Consider using morphological operations like erosion and dilation to refine the mask and remove small holes or gaps in the detected green regions. This can improve the accuracy of contour detection.
Alternative Contour Retrieval Modes: The code uses cv2.RETR_EXTERNAL to find only the outermost contours. Explore other retrieval modes like cv2.RETR_LIST or cv2.RETR_TREE if you need to analyze the hierarchy of contours (e.g., objects within objects).
Performance Optimization: For real-time applications, optimize your code by:
This code snippet demonstrates how to detect and highlight green objects within an image using OpenCV in Python.
Here's a breakdown of the process:
cv2.imread().cv2.cvtColor(). HSV is preferred for color detection due to its better separation of color information.np.array(). These values can be adjusted to target specific shades of green.cv2.inRange().cv2.findContours().cv2.rectangle().cv2.imshow().In essence, this code leverages color thresholding in HSV space and contour detection to locate and highlight green objects within an image.
This code effectively isolates and highlights green objects within an image using a combination of color space transformations, thresholding, and contour detection techniques provided by OpenCV. By converting the image to HSV, defining a suitable green color range, and leveraging OpenCV's functions for masking, contour finding, and drawing, the code accurately identifies and marks green objects with bounding boxes. This approach is adaptable for different shades of green and can serve as a foundation for more complex applications like object tracking or image segmentation in various fields.
 tracking multiple objects by color Python OpenCV 2.x wrapper ... | Jul 22, 2014 ... array([130,255,255]) # Threshold the HSV image to get only blue colors mask = cv2. ... Green threshold image. I don't know how to add Green ...
tracking multiple objects by color Python OpenCV 2.x wrapper ... | Jul 22, 2014 ... array([130,255,255]) # Threshold the HSV image to get only blue colors mask = cv2. ... Green threshold image. I don't know how to add Green ... python - Choosing the correct upper and lower HSV boundaries for ... | Jun 8, 2012 ... ... cv2.waitKey();cv2.destroyAllWindows(). Similar answers: How to define a threshold value to detect only green colour objects in an image :Opencv.
python - Choosing the correct upper and lower HSV boundaries for ... | Jun 8, 2012 ... ... cv2.waitKey();cv2.destroyAllWindows(). Similar answers: How to define a threshold value to detect only green colour objects in an image :Opencv.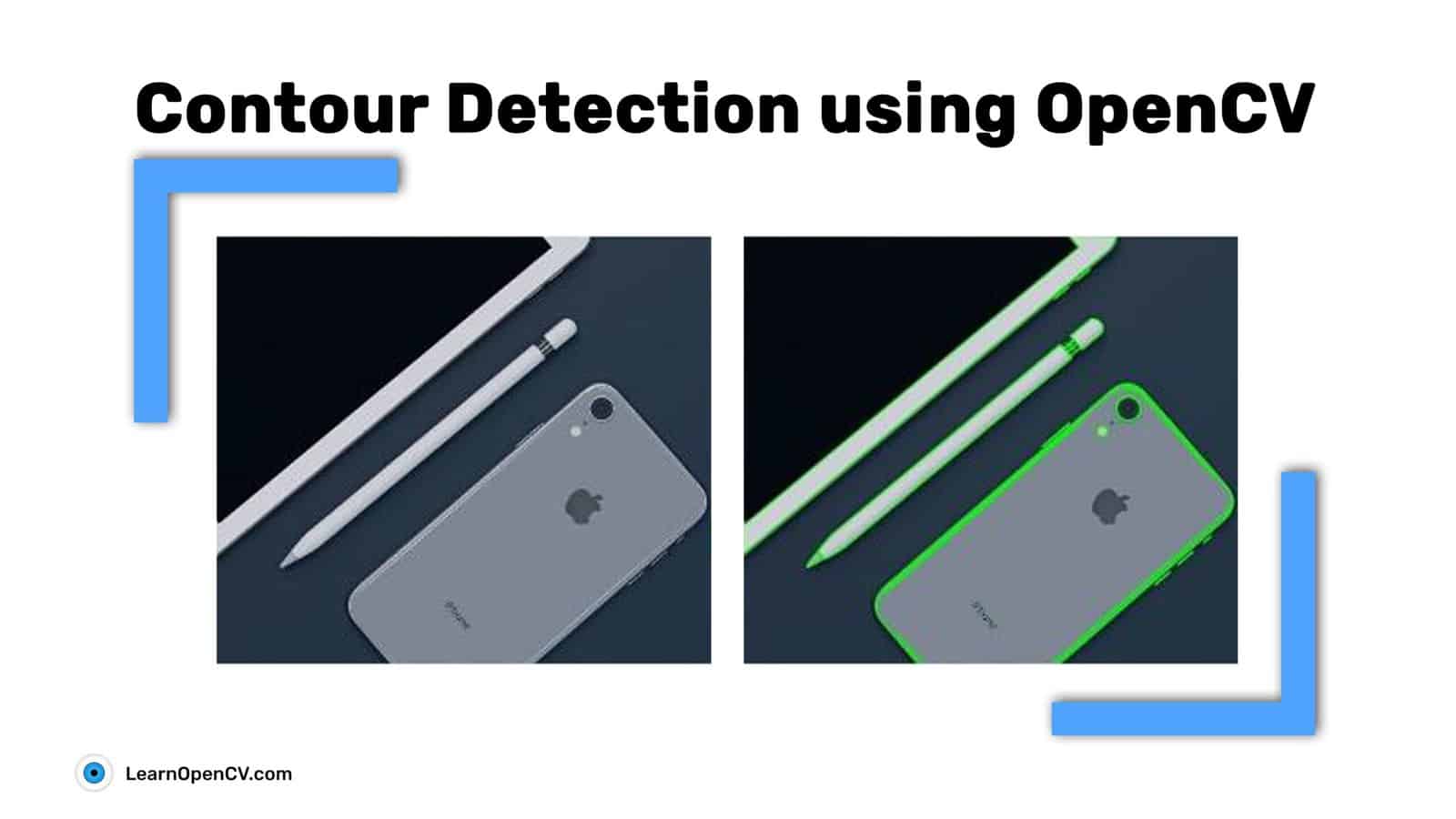 Contour Detection using OpenCV (Python/C++) | Learn contour detection using OpenCV. Not only the theory, we will also cover a complete hands-on coding in Python/C++ for a first hand, practical experience. python - what are recommended color spaces for detecting orange ... | Jan 30, 2018 ... detect green / yellow/ blue. How to define a threshold value to detect only green colour objects in an image :Opencv. detect two different ...
Contour Detection using OpenCV (Python/C++) | Learn contour detection using OpenCV. Not only the theory, we will also cover a complete hands-on coding in Python/C++ for a first hand, practical experience. python - what are recommended color spaces for detecting orange ... | Jan 30, 2018 ... detect green / yellow/ blue. How to define a threshold value to detect only green colour objects in an image :Opencv. detect two different ... Detection of ArUco Markers - OpenCV | Note that this parameter should be large enough to store the number of bits for the specific dictionary. So, for instance, you cannot generate an image of 5x5 ... python - How to find the RED color regions using OpenCV? - Stack ... | Jul 8, 2018 ... ... for color detection with
Detection of ArUco Markers - OpenCV | Note that this parameter should be large enough to store the number of bits for the specific dictionary. So, for instance, you cannot generate an image of 5x5 ... python - How to find the RED color regions using OpenCV? - Stack ... | Jul 8, 2018 ... ... for color detection withcv::inRange (OpenCV) · How to define a threshold value to detect only green colour objects in an image :Opencv · How ... Color Identification in Images using Python - OpenCV - GeeksforGeeks | A Computer Science portal for geeks. It contains well written, well thought and well explained computer science and programming articles, quizzes and practice/competitive programming/company interview Questions. opencv - Detect if image is color, grayscale or black and white using ... | Nov 19, 2013 ... How can I define a threshold value to detect only green colour objects in an image with Python OpenCV? 10 · Detecting grayscale images with .Net ... Changing Colorspaces - OpenCV | Object Tracking · import · import · # Take each frame · # Convert BGR to HSV · # define range of blue color in HSV · # Threshold the HSV image to get only blue colors.
Color Identification in Images using Python - OpenCV - GeeksforGeeks | A Computer Science portal for geeks. It contains well written, well thought and well explained computer science and programming articles, quizzes and practice/competitive programming/company interview Questions. opencv - Detect if image is color, grayscale or black and white using ... | Nov 19, 2013 ... How can I define a threshold value to detect only green colour objects in an image with Python OpenCV? 10 · Detecting grayscale images with .Net ... Changing Colorspaces - OpenCV | Object Tracking · import · import · # Take each frame · # Convert BGR to HSV · # define range of blue color in HSV · # Threshold the HSV image to get only blue colors.