Machine Vision
OpenCV solvePnP: Get Camera Position in World Coordinates
Learn how to calculate the camera position in world coordinates using the cv::solvePnP function in OpenCV for accurate 3D object pose estimation.
Learn how to calculate the camera position in world coordinates using the cv::solvePnP function in OpenCV for accurate 3D object pose estimation.

In computer vision, determining the position and orientation of a camera from a single image, known as camera pose estimation, is a fundamental problem. This process involves understanding how a 3D scene is projected onto a 2D image plane. This article provides a step-by-step guide on how to perform camera pose estimation using OpenCV in Python. We will cover camera calibration, establishing 3D-2D point correspondences, utilizing the solvePnP function, and interpreting the results to obtain the camera's position and orientation in the world coordinate system.
Calibrate your camera: Obtain the intrinsic matrix (focal length, principal point) and distortion coefficients.
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)Identify 3D-2D point correspondences: You need a set of 3D points in the world coordinate system and their corresponding 2D projections in the image.
# 3D points in world coordinates
world_points = np.array([[0, 0, 0], [1, 0, 0], [0, 1, 0]], dtype=np.float32)
# Corresponding 2D points in image coordinates
image_points = np.array([[100, 100], [200, 100], [100, 200]], dtype=np.float32)Use cv2.solvePnP(): This function estimates the camera pose (rotation and translation) from the 3D-2D point correspondences.
success, rotation_vector, translation_vector = cv2.solvePnP(world_points, image_points, mtx, dist)Convert rotation vector to rotation matrix:
rotation_matrix, _ = cv2.Rodrigues(rotation_vector)Camera position: The translation vector from solvePnP represents the camera's position in the world coordinate system.
Camera orientation: The rotation matrix represents the camera's orientation in the world coordinate system.
Note:
This Python code estimates the position and orientation of a calibrated camera using 3D-2D point correspondences. It assumes pre-calibrated camera parameters and takes known 3D points and their corresponding 2D projections in an image. The code utilizes OpenCV's solvePnP function to compute the camera pose, represented by a rotation and translation vector. The rotation vector is then converted to a rotation matrix for easier interpretation. Finally, the code calculates and displays the camera's position and orientation.
import cv2
import numpy as np
# Placeholder for image and object points from calibration
# (Replace with actual values from your calibration)
objpoints = ...
imgpoints = ...
# Camera calibration
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# 3D points in world coordinates (example)
world_points = np.array([[0, 0, 0], [1, 0, 0], [0, 1, 0]], dtype=np.float32)
# Corresponding 2D points in image coordinates (example)
image_points = np.array([[100, 100], [200, 100], [100, 200]], dtype=np.float32)
# Estimate camera pose
success, rotation_vector, translation_vector = cv2.solvePnP(world_points, image_points, mtx, dist)
# Convert rotation vector to rotation matrix
rotation_matrix, _ = cv2.Rodrigues(rotation_vector)
# Camera position
camera_position = -np.dot(rotation_matrix.T, translation_vector)
# Print results
print("Camera Position:\n", camera_position)
print("Camera Orientation (Rotation Matrix):\n", rotation_matrix)
# Further actions:
# - Project 3D points to the image plane using cv2.projectPoints()
# - Visualize the camera pose in 3D spaceExplanation:
mtx (intrinsic matrix) and dist (distortion coefficients).world_points and image_points with your actual 3D-2D point pairs.cv2.solvePnP() calculates the rotation_vector and translation_vector representing the camera pose.cv2.Rodrigues().translation_vector directly represents the camera position. The rotation_matrix describes the camera's orientation in the world coordinate system.Important:
matplotlib or Open3D to visualize the estimated camera pose and 3D points for better understanding.mtx and dist parameters obtained from calibration are used in cv2.solvePnP() to correct for lens distortion. If your application requires, you can disable this correction by passing None for the dist argument.cv2.solvePnP() can work with a minimum of four 3D-2D point correspondences, using more points generally improves the accuracy and robustness of the pose estimation.success flag returned by cv2.solvePnP() indicates whether the pose estimation was successful. It's good practice to check this flag and handle cases where the estimation fails.cv2.findHomography and cv2.solvePnPRansac. These functions might be more suitable depending on the specific requirements of your application.This guide outlines the process of estimating a camera's position and orientation in 3D space using OpenCV in Python.
Steps:
Camera Calibration: Determine the camera's intrinsic parameters (focal length, principal point, distortion coefficients) using cv2.calibrateCamera(). This step requires a set of images with known calibration patterns.
Establish 3D-2D Point Correspondences: Identify a set of 3D points in the world coordinate system and their corresponding 2D projections in the image. These points act as anchors for pose estimation.
Solve for Camera Pose: Utilize cv2.solvePnP() to estimate the camera's rotation and translation vectors based on the 3D-2D point correspondences, intrinsic matrix, and distortion coefficients.
Convert Rotation Vector: Transform the rotation vector obtained from solvePnP() into a more interpretable rotation matrix using cv2.Rodrigues().
Interpret Results:
solvePnP() directly represents the camera's 3D position in the world coordinate system.Key Considerations:
This approach provides a practical method for determining camera pose, enabling applications like augmented reality, 3D reconstruction, and robotics navigation.
By accurately calibrating the camera, establishing precise 3D-2D point correspondences, and employing the robust solvePnP algorithm, we can effectively determine the camera's pose, represented by its position and orientation, from a single image. This fundamental computer vision technique finds wide-ranging applications in fields such as augmented reality, robotics, 3D modeling, and object tracking, enabling interactions between the virtual and real worlds. Understanding the underlying principles, coordinate systems, and potential sources of error is crucial for successful implementation and accurate pose estimation. As computer vision continues to advance, camera pose estimation will undoubtedly play an increasingly vital role in shaping our technological landscape.
 Obtain Camera Pose and camera real world position using ... | Aug 3, 2017 ... Obtain Camera Pose and camera real world position using SolvePnP C++ ... It's a fisheye camera, did you calibrate using the cv::fisheye::calibrate ...
Obtain Camera Pose and camera real world position using ... | Aug 3, 2017 ... Obtain Camera Pose and camera real world position using SolvePnP C++ ... It's a fisheye camera, did you calibrate using the cv::fisheye::calibrate ... Python Opencv SolvePnP yields wrong translation vector - Stack ... | Jan 25, 2013 ... Camera position in world coordinate from cv::solvePnP · 24 · How does one convert world coordinates to camera coordinates? 17 · Calculate camera ...
Python Opencv SolvePnP yields wrong translation vector - Stack ... | Jan 25, 2013 ... Camera position in world coordinate from cv::solvePnP · 24 · How does one convert world coordinates to camera coordinates? 17 · Calculate camera ... SolvePNP and world relative rotation - OpenCV | Hello. I am using SolvePNP and rotation is (seems for me) to be relative to camera “look at” orientation instead of camera axis, which are fixed to the world. So for example in order to make sure that rotation is 0 I need look directly with my object to the camera. While I’d like to have angle to be absolute. Can you pls explain how I can get rotation relative to camera axis? Thanks, Greg
SolvePNP and world relative rotation - OpenCV | Hello. I am using SolvePNP and rotation is (seems for me) to be relative to camera “look at” orientation instead of camera axis, which are fixed to the world. So for example in order to make sure that rotation is 0 I need look directly with my object to the camera. While I’d like to have angle to be absolute. Can you pls explain how I can get rotation relative to camera axis? Thanks, Greg SolvePnP seems......sensitive - Programming - Chief Delphi | It’s the off season, and we’re trying to get things done that didn’t happen during the regular season. High on my list is improving autonomous programming and computer vision. We’re using OpenCV on a Jevois camera. My main task right now is to use the vision targets to guide the robot to the right spot to place hatch panels. Fairly straightforward. Lots of teams have done it, and yet we didn’t get it done this season. There are a few ways to approach this task, but here’s the one I chose: ...
SolvePnP seems......sensitive - Programming - Chief Delphi | It’s the off season, and we’re trying to get things done that didn’t happen during the regular season. High on my list is improving autonomous programming and computer vision. We’re using OpenCV on a Jevois camera. My main task right now is to use the vision targets to guide the robot to the right spot to place hatch panels. Fairly straightforward. Lots of teams have done it, and yet we didn’t get it done this season. There are a few ways to approach this task, but here’s the one I chose: ... Camera position in world coordinate from cv::solvePnP ... | The term \ Finding camera location with solvePNP - Programming - Chief Delphi | We’re trying to get some of the vision tracking going that never quite worked during the season.$@# I’m having a bit of a problem with localization.$@# I’m wondering if anyone in the CD community can spot the flaw in what I am doing. I’m afraid this will be directed mostly to mentors here, but if a student happened to understand the question and provide an answer, I would be very pleased and impressed. $@# My goal is to find the position of the camera in world (model) coordinates by finding th...
Camera position in world coordinate from cv::solvePnP ... | The term \ Finding camera location with solvePNP - Programming - Chief Delphi | We’re trying to get some of the vision tracking going that never quite worked during the season.$@# I’m having a bit of a problem with localization.$@# I’m wondering if anyone in the CD community can spot the flaw in what I am doing. I’m afraid this will be directed mostly to mentors here, but if a student happened to understand the question and provide an answer, I would be very pleased and impressed. $@# My goal is to find the position of the camera in world (model) coordinates by finding th...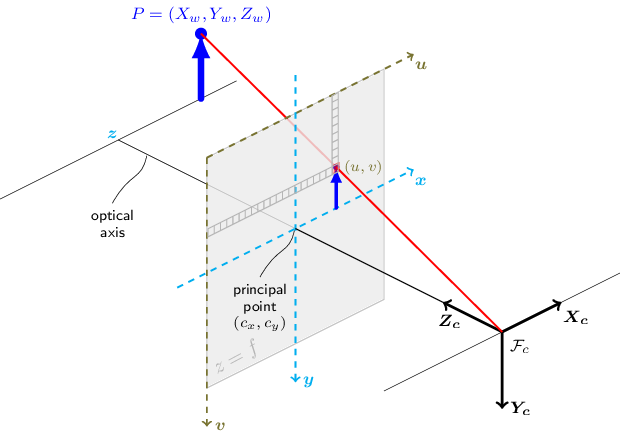 Camera Calibration and 3D Reconstruction - OpenCV | Compute undistorted image points position. void, cv::undistortPoints ... points given in the world's coordinate system into the first image. projMatr2 ...
Camera Calibration and 3D Reconstruction - OpenCV | Compute undistorted image points position. void, cv::undistortPoints ... points given in the world's coordinate system into the first image. projMatr2 ...