Machine Vision
Fast R-CNN ROI Layer: Purpose & Explanation
This article explains the role of the ROI layer in Fast R-CNN object detection, focusing on its contribution to efficient region proposal handling and feature extraction.
This article explains the role of the ROI layer in Fast R-CNN object detection, focusing on its contribution to efficient region proposal handling and feature extraction.

Object detection, a cornerstone of computer vision, goes beyond simple image classification by locating and identifying objects within an image. This article delves into the workings of Region-based Convolutional Neural Networks (R-CNNs), a family of influential object detection algorithms. We'll break down the process into five key steps, illustrating how R-CNNs pinpoint objects and their categories.
Start with feature extraction: An image is passed through a convolutional neural network (CNN) to extract features. This could be a network like VGG16 or ResNet.
features = cnn_backbone(image) Propose regions of interest (ROIs): A separate algorithm like Selective Search or, in the case of Faster R-CNN, a Region Proposal Network (RPN), proposes potential bounding boxes that might contain objects.
rois = propose_regions(image) ROI pooling: Each ROI from step 2 is projected onto the feature map from step 1. Since ROIs can have different sizes, ROI pooling is used to extract a fixed-size feature vector from each ROI's projection on the feature map.
roi_features = roi_pooling(features, rois) Classification and regression: The fixed-size feature vectors are then fed into fully connected layers for:
class_scores, bbox_regressions = fully_connected(roi_features)Output: The final output is a set of bounding boxes with associated class labels and confidence scores.
final_bboxes = refine_bboxes(rois, bbox_regressions)In essence: The ROI layer acts as a bridge between the CNN's feature map and the final classification/regression heads, allowing the network to learn object representations from regions of interest within an image.
This Python code implements a simplified version of the Region-based Convolutional Neural Network (R-CNN) for object detection. It uses a pre-trained VGG16 model for feature extraction and includes a custom ROI pooling layer. The code defines functions for region proposal (using a placeholder for now), creating classification and regression heads, and assembling the complete R-CNN model. An example usage demonstrates how to pass an image and proposed regions through the model to obtain class scores and bounding box regressions. Note that this is a basic implementation and requires further development for real-world applications, including integrating a robust region proposal method, non-maximum suppression, and bounding box refinement.
import tensorflow as tf
from tensorflow.keras import layers, models
# --- 1. Feature Extraction ---
def create_cnn_backbone():
"""Creates a CNN backbone for feature extraction (e.g., VGG16)."""
base_model = tf.keras.applications.VGG16(
include_top=False, # Exclude the original classifier
weights="imagenet",
input_shape=(224, 224, 3) # Adjust input shape as needed
)
return models.Model(inputs=base_model.input, outputs=base_model.output)
cnn_backbone = create_cnn_backbone()
# --- 2. Region Proposal (Simplified Example) ---
def propose_regions(image):
"""Simplified region proposal (replace with Selective Search or RPN)."""
# In a real implementation, you'd use a more sophisticated method
height, width = image.shape[:2]
return [
[0.1 * width, 0.2 * height, 0.3 * width, 0.4 * height], # Example ROI 1
[0.5 * width, 0.6 * height, 0.7 * width, 0.8 * height] # Example ROI 2
]
# --- 3. ROI Pooling ---
class ROIPooling(layers.Layer):
def __init__(self, pool_size=(7, 7), **kwargs):
super(ROIPooling, self).__init__(**kwargs)
self.pool_size = pool_size
def call(self, feature_map, rois):
"""
Performs ROI pooling.
Args:
feature_map: The feature map from the CNN backbone.
rois: A tensor of shape (num_rois, 4) with bounding box coordinates
in format [x_min, y_min, x_max, y_max].
Returns:
pooled_features: A tensor of shape (num_rois, pool_height, pool_width, channels).
"""
pooled_features = tf.image.crop_and_resize(
image=feature_map,
boxes=rois,
box_indices=tf.zeros(tf.shape(rois)[0], dtype=tf.int32), # Assuming single batch
crop_size=self.pool_size
)
return pooled_features
roi_pooling_layer = ROIPooling()
# --- 4. Classification and Regression Heads ---
def create_classifier_head(num_classes):
"""Creates the classification and regression heads."""
inputs = layers.Input(shape=(7, 7, 512)) # Adjust input shape based on ROI pooling
x = layers.Flatten()(inputs)
x = layers.Dense(4096, activation='relu')(x)
x = layers.Dropout(0.5)(x)
class_scores = layers.Dense(num_classes, activation='softmax', name='class_output')(x)
bbox_regressions = layers.Dense(4 * num_classes, activation='linear', name='bbox_output')(x)
return models.Model(inputs=inputs, outputs=[class_scores, bbox_regressions])
classifier_head = create_classifier_head(num_classes=20) # Example: 20 classes
# --- 5. Combine Components ---
def create_rcnn_model(cnn_backbone, roi_pooling_layer, classifier_head):
"""Creates the complete R-CNN model."""
image_input = layers.Input(shape=(224, 224, 3)) # Adjust input shape as needed
features = cnn_backbone(image_input)
rois = layers.Input(shape=(None, 4), dtype=tf.float32) # Variable number of ROIs
roi_features = roi_pooling_layer(features, rois)
class_scores, bbox_regressions = classifier_head(roi_features)
return models.Model(inputs=[image_input, rois], outputs=[class_scores, bbox_regressions])
rcnn_model = create_rcnn_model(cnn_backbone, roi_pooling_layer, classifier_head)
# --- Example Usage ---
# ... (Load and preprocess image) ...
image = tf.random.normal(shape=(1, 224, 224, 3)) # Example image
rois = propose_regions(image[0])
rois = tf.constant([rois], dtype=tf.float32) # Convert to tensor
class_scores, bbox_regressions = rcnn_model([image, rois])
# ... (Process outputs: Non-max suppression, bounding box refinement, etc.) ... Explanation:
cnn_backbone using a pre-trained VGG16 (you can replace it with other architectures).propose_regions function is a placeholder. In a real application, you would integrate Selective Search or a Region Proposal Network (RPN).ROIPooling layer extracts fixed-size feature vectors from the feature map for each ROI.classifier_head takes the pooled features and predicts class probabilities and bounding box refinements.create_rcnn_model function combines all the components.Important Notes:
General R-CNN Concepts:
Code Specific Notes:
propose_regions) and assumes a fixed input image size. In a real application, these need to be replaced with appropriate implementations and handle variable image sizes.ROIPooling layer is a basic implementation using tf.image.crop_and_resize. More sophisticated implementations might use bilinear interpolation or other techniques for better accuracy.Further Exploration:
This article describes a common approach to object detection in images using ROI (Region of Interest) pooling. Here's a breakdown:
1. Feature Extraction: A pre-trained Convolutional Neural Network (CNN) like VGG16 or ResNet analyzes the input image and extracts high-level features.
2. Region Proposal: An algorithm like Selective Search or a Region Proposal Network (RPN) identifies potential regions within the image that might contain objects. These regions are represented as bounding boxes.
3. ROI Pooling: Each proposed region is projected onto the feature map generated in step 1. Since these regions can have varying sizes, ROI pooling extracts a fixed-size feature vector from each region's projection. This ensures consistent input for the subsequent classification and regression tasks.
4. Classification and Regression: The fixed-size feature vectors are fed into fully connected layers to:
5. Output: The final output consists of refined bounding boxes, each associated with a predicted class label and a confidence score.
Key Takeaway: ROI pooling acts as a crucial link between the CNN's feature extraction capabilities and the final object detection tasks. It allows the network to focus on specific regions of interest within the image, enabling efficient and accurate object detection.
In conclusion, R-CNNs and their variants offer a powerful framework for object detection by combining feature extraction, region proposal, and ROI pooling. This approach allows for the identification and localization of objects within an image, paving the way for advancements in various fields. While the provided code offers a basic implementation, understanding the underlying principles and exploring further developments in region proposal methods, pooling techniques, and advanced architectures is crucial for building robust and efficient object detection systems.
 Fast R-CNN: What is the Purpose of the ROI Layers? | Baeldung on ... | Explore the RoI pooling layers and their impact on the speed and accuracy of Fast R-CNN.
Fast R-CNN: What is the Purpose of the ROI Layers? | Baeldung on ... | Explore the RoI pooling layers and their impact on the speed and accuracy of Fast R-CNN. Understanding Region of Interest (RoI Pooling) - Blog by Kemal Erdem | Quick and easy explanation what is RoI Pooling and how it works? Why do we event using it in Fast R-CNNs? Can we use sth better instead?
Understanding Region of Interest (RoI Pooling) - Blog by Kemal Erdem | Quick and easy explanation what is RoI Pooling and how it works? Why do we event using it in Fast R-CNNs? Can we use sth better instead?![The Fundamental Guide to Faster R-CNN [2025] - viso.ai](https://viso.ai/wp-content/uploads/2024/08/Fast-R-CNN-Featured-Image-scaled.jpg) The Fundamental Guide to Faster R-CNN [2025] - viso.ai | Explore the concepts of Faster R-CNN in this guide covering its development, training, community projects, challenges, & future advancements.
The Fundamental Guide to Faster R-CNN [2025] - viso.ai | Explore the concepts of Faster R-CNN in this guide covering its development, training, community projects, challenges, & future advancements. Add layer to Faster-RCNN model - PyTorch Forums | Hello, I have a pretrained Faster-RCNN model that I would like to customise by adding a layer after the output of the backbone. Can anyone help me? I chose not to create a backbone and then use it as an input to FasterRCNN function because I have the faster Rcnn pretrained on its own.
Add layer to Faster-RCNN model - PyTorch Forums | Hello, I have a pretrained Faster-RCNN model that I would like to customise by adding a layer after the output of the backbone. Can anyone help me? I chose not to create a backbone and then use it as an input to FasterRCNN function because I have the faster Rcnn pretrained on its own. Faster R-CNN Explained for Object Detection Tasks | DigitalOcean | Technical tutorials, Q&A, events — This is an inclusive place where developers can find or lend support and discover new ways to contribute to the community.
Faster R-CNN Explained for Object Detection Tasks | DigitalOcean | Technical tutorials, Q&A, events — This is an inclusive place where developers can find or lend support and discover new ways to contribute to the community. neural networks - In Fast R-CNN, how are input RoIs mapped to the ... | Mar 4, 2020 ... The ROIs in the input space are mapped to the feature map space, by dividing it by the net stride at that layer. Say, in a network, ...
neural networks - In Fast R-CNN, how are input RoIs mapped to the ... | Mar 4, 2020 ... The ROIs in the input space are mapped to the feature map space, by dividing it by the net stride at that layer. Say, in a network, ...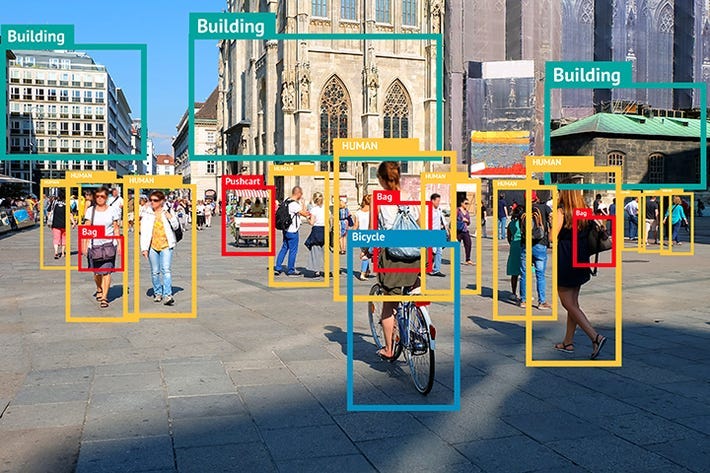 Your Complete Guide to RCNN, Fast-RCNN, Faster-RCNN and ... | In this article, I provide a detailed overview and summary of the RCNN family.
Your Complete Guide to RCNN, Fast-RCNN, Faster-RCNN and ... | In this article, I provide a detailed overview and summary of the RCNN family.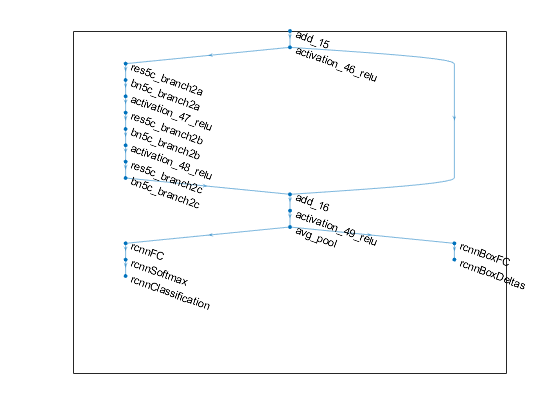 Create Fast R-CNN Object Detection Network | Add ROI Max Pooling Layer. The next step is to choose which layer in the network to use as the feature extraction layer. This layer will be connected to the ROI ...
Create Fast R-CNN Object Detection Network | Add ROI Max Pooling Layer. The next step is to choose which layer in the network to use as the feature extraction layer. This layer will be connected to the ROI ...