Imagine trying to describe a cat to someone who's never seen one. You might talk about its pointy ears, fluffy tail, or bright eyes. These are like "features" that help us recognize a cat. Computers can do something similar using feature descriptors. Let's say you have a picture of a cat. You can use a computer program to find specific points of interest in the image, like the tips of its ears or the edges of its whiskers. These points are called "keypoints." Around each keypoint, the program analyzes a small area, like drawing a tiny square around it. This square is called a "patch." The program then calculates a set of numbers that describe what's inside that patch – things like the edges, textures, and colors. This set of numbers is called a "feature descriptor."
-
Start with an image: Imagine you have a picture of a cat.
-
Find key points: Think of these as the most interesting parts of the image, like the cat's eyes, nose, or the edges of its whiskers. These are called "features."
import cv2
img = cv2.imread('cat.jpg', 0)
orb = cv2.ORB_create()
keypoints = orb.detect(img,None)
-
Draw a patch: Imagine drawing a small square around each key point you identified.
-
Calculate descriptor: For each patch, you calculate a set of numbers that describe what's inside that patch. This could be based on things like:
-
Edges and corners: Are there lots of lines, or is it mostly smooth?
-
Texture: Is it furry, smooth, or bumpy?
-
Color: What are the main colors in this patch?
keypoints, descriptors = orb.compute(img, keypoints)
-
Create a feature vector: You end up with a list of numbers (the descriptor) for each key point. This list is like a unique fingerprint for that point.
-
Match features: Now, if you have another picture and want to see if it also has a cat, you do the same process. You find key points, calculate descriptors, and then compare the descriptors between the two images. If many descriptors match, it's likely both images contain the same object (in this case, a cat!).
In simple terms: A feature descriptor is like a fingerprint for a specific part of an image. It helps computers recognize and match objects in different images.
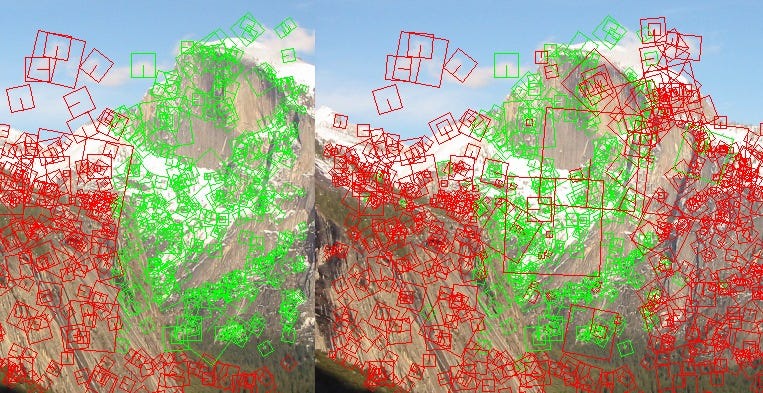
The Python code performs feature matching between two images using the ORB algorithm. It loads the images, detects keypoints, and calculates descriptors. Then, it matches the descriptors, sorts them by distance, and draws lines connecting the top 10 matches. Finally, it displays the image with the drawn matches.
import cv2
import matplotlib.pyplot as plt
# Load the images
img1 = cv2.imread('cat1.jpg', 0) # Replace with your image
img2 = cv2.imread('cat2.jpg', 0) # Replace with your image
# Initiate ORB detector
orb = cv2.ORB_create()
# Find the keypoints and compute descriptors
kp1, des1 = orb.detectAndCompute(img1, None)
kp2, des2 = orb.detectAndCompute(img2, None)
# Create BFMatcher object
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# Match descriptors
matches = bf.match(des1, des2)
# Sort them in the order of their distance
matches = sorted(matches, key=lambda x: x.distance)
# Draw first 10 matches
img3 = cv2.drawMatches(img1, kp1, img2, kp2, matches[:10], None, flags=2)
# Display the image
plt.imshow(img3)
plt.show()Explanation:
-
Import Libraries: We import
cv2 for OpenCV functions and matplotlib.pyplot for displaying images.
-
Load Images: We load two images of cats (replace
cat1.jpg and cat2.jpg with your image filenames).
-
Initialize ORB Detector: We create an ORB (Oriented FAST and Rotated BRIEF) object, a fast and efficient feature detector.
-
Find Keypoints and Descriptors: We use
orb.detectAndCompute() to find keypoints and calculate their descriptors in both images.
-
Create BFMatcher: We create a Brute-Force Matcher object to compare descriptors.
cv2.NORM_HAMMING is used as the distance metric for ORB descriptors.
-
Match Descriptors: We use
bf.match() to find the best matches between descriptors from the two images.
-
Sort Matches: We sort the matches based on their distance (lower distance means a better match).
-
Draw Matches: We use
cv2.drawMatches() to draw lines connecting the top 10 matching keypoints between the two images.
-
Display Image: Finally, we display the image with the drawn matches using
matplotlib.pyplot.
This code will find and visualize matching features between two images, indicating the presence of similar objects (cats in this case) in both images.
Technical Details:
-
Different algorithms: ORB is just one algorithm for finding keypoints and descriptors. Other popular ones include SIFT, SURF, and AKAZE. Each has its own strengths and weaknesses in terms of speed, accuracy, and robustness to changes in viewpoint, lighting, etc.
-
Descriptor size: The length of the feature vector (number of numbers describing the patch) varies depending on the algorithm. A longer vector can hold more information but requires more computation.
-
Matching challenges: Matching descriptors perfectly is rare, especially in real-world images with noise and changes in perspective. Algorithms use various techniques to find the "best" matches even if they're not identical.
Applications:
-
Object recognition: Beyond just identifying the same object, feature descriptors can be used to train machine learning models to recognize different object categories (cats, dogs, cars, etc.).
-
Image stitching: Panoramas are created by stitching together multiple images. Feature descriptors help align the images accurately.
-
3D reconstruction: By matching features across multiple images taken from different angles, we can infer the 3D structure of a scene.
-
Tracking: Feature descriptors can track the movement of objects or people across video frames.
Analogies:
-
Think of a detective: They might use fingerprints (feature descriptors) found at a crime scene to identify a suspect (object) from a database.
-
Or a jigsaw puzzle: Each piece (patch) has a unique shape (descriptor) that allows it to fit only with its corresponding piece.
Key takeaway: Feature descriptors are a powerful tool in computer vision, enabling computers to "see" and understand images in a way similar to how humans do.
This article explains how computers recognize objects in images using feature descriptors. Here's a simplified breakdown:
-
Identify Key Points: Imagine focusing on the most interesting parts of an image, like the edges of a cat's whiskers or its eyes. These are called key points.
-
Draw Patches: Think of drawing small squares around each key point.
-
Calculate Descriptors: For each patch, the computer calculates a set of numbers (the descriptor) that describe what's inside. This could be based on:
-
Edges and corners: Are there sharp lines or smooth curves?
-
Texture: Is it rough, smooth, or patterned?
-
Color: What are the dominant colors?
-
Unique Fingerprints: Each descriptor acts like a unique fingerprint for that specific part of the image.
-
Matching Objects: To see if two images contain the same object, the computer compares the descriptors from both images. If many descriptors match, it's likely they both show the same object!
In essence, feature descriptors allow computers to recognize and match objects by analyzing and comparing unique patterns within images.
Feature descriptors are essential components in computer vision, enabling machines to "see" and interpret images similarly to humans. By identifying key points, analyzing patches around them, and generating unique descriptors, computers can recognize and match objects across different images. This technology has wide-ranging applications, from object recognition and image stitching to 3D reconstruction and tracking. Just like fingerprints help identify individuals, feature descriptors provide a robust method for computers to understand and navigate the visual world.
-
 Feature Descriptor in Image Processing - GeeksforGeeks | A Computer Science portal for geeks. It contains well written, well thought and well explained computer science and programming articles, quizzes and practice/competitive programming/company interview Questions.
Feature Descriptor in Image Processing - GeeksforGeeks | A Computer Science portal for geeks. It contains well written, well thought and well explained computer science and programming articles, quizzes and practice/competitive programming/company interview Questions.
-
 What Is a Feature Descriptor in Image Processing? | Baeldung on ... | Learn about feature descriptors, feature vectors, and feature space.
What Is a Feature Descriptor in Image Processing? | Baeldung on ... | Learn about feature descriptors, feature vectors, and feature space.
-
 Introduction To Feature Detection And Matching | by Deep | Medium | Feature detection and matching is an important task in many computer vision applications, such as structure-from-motion, image retrieval…
Introduction To Feature Detection And Matching | by Deep | Medium | Feature detection and matching is an important task in many computer vision applications, such as structure-from-motion, image retrieval…
-
![A Review of Image Feature Descriptors in Visual Positioning]() A Review of Image Feature Descriptors in Visual Positioning | ... feature description algorithm relying on image feature points can describe the feature ... flow, and finding a new way, the method of directly processing the ...
A Review of Image Feature Descriptors in Visual Positioning | ... feature description algorithm relying on image feature points can describe the feature ... flow, and finding a new way, the method of directly processing the ...
-
 Visual descriptor - Wikipedia | In computer vision, visual descriptors or image descriptors are descriptions of the visual features of the contents in images, videos, or algorithms or ...
Visual descriptor - Wikipedia | In computer vision, visual descriptors or image descriptors are descriptions of the visual features of the contents in images, videos, or algorithms or ...
-
 Local Tetra Patterns: A New Feature Descriptor for Content-Based ... | In this paper, we propose a novel image indexing and retrieval algorithm using local tetra patterns (LTrPs) for content-based image retrieval (CBIR). The standard local binary pattern (LBP) and local ternary pattern (LTP) encode the relationship between the referenced pixel and its surrounding neighbors by computing gray-level difference. The proposed method encodes the relationship between the referenced pixel and its neighbors, based on the directions that are calculated using the first-order derivatives in vertical and horizontal directions. In addition, we propose a generic strategy to compute nth-order LTrP using (n - 1)th-order horizontal and vertical derivatives for efficient CBIR and analyze the effectiveness of our proposed algorithm by combining it with the Gabor transform. The performance of the proposed method is compared with the LBP, the local derivative patterns, and the LTP based on the results obtained using benchmark image databases viz., Corel 1000 database (DB1), Brodatz texture database (
Local Tetra Patterns: A New Feature Descriptor for Content-Based ... | In this paper, we propose a novel image indexing and retrieval algorithm using local tetra patterns (LTrPs) for content-based image retrieval (CBIR). The standard local binary pattern (LBP) and local ternary pattern (LTP) encode the relationship between the referenced pixel and its surrounding neighbors by computing gray-level difference. The proposed method encodes the relationship between the referenced pixel and its neighbors, based on the directions that are calculated using the first-order derivatives in vertical and horizontal directions. In addition, we propose a generic strategy to compute nth-order LTrP using (n - 1)th-order horizontal and vertical derivatives for efficient CBIR and analyze the effectiveness of our proposed algorithm by combining it with the Gabor transform. The performance of the proposed method is compared with the LBP, the local derivative patterns, and the LTP based on the results obtained using benchmark image databases viz., Corel 1000 database (DB1), Brodatz texture database (
-
feature descriptor - an overview | ScienceDirect Topics | ... features, and the term feature descriptors for image processing features. ... algorithms on one feature set (see Section 4.5 for more details). The results ...
-
LMFD: lightweight multi-feature descriptors for image stitching ... | Nov 30, 2023 ... In the realm of image stitching, numerous studies have focused on developing feature point detection and description algorithms. Notable ...
-
 Local Feature Descriptor for Image Matching: A Survey | IEEE ... | Image registration is an important technique in many computer vision applications such as image fusion, image retrieval, object tracking, face recognition, change detection and so on. Local feature descriptors, i.e., how to detect features and how to describe them, play a fundamental and important role in image registration process, which directly influence the accuracy and robustness of image registration. This paper mainly focuses on the variety of local feature descriptors including some theoretical research, mathematical models, and methods or algorithms along with their applications in the context of image registration. The existing local feature descriptors are roughly classified into six categories to demonstrate and analyze comprehensively their own advantages. The current and future challenges of local feature descriptors are discussed. The major goal of the paper is to present a unique survey of the state-of-the-art image matching methods based on feature descriptor, from which future research may b
Local Feature Descriptor for Image Matching: A Survey | IEEE ... | Image registration is an important technique in many computer vision applications such as image fusion, image retrieval, object tracking, face recognition, change detection and so on. Local feature descriptors, i.e., how to detect features and how to describe them, play a fundamental and important role in image registration process, which directly influence the accuracy and robustness of image registration. This paper mainly focuses on the variety of local feature descriptors including some theoretical research, mathematical models, and methods or algorithms along with their applications in the context of image registration. The existing local feature descriptors are roughly classified into six categories to demonstrate and analyze comprehensively their own advantages. The current and future challenges of local feature descriptors are discussed. The major goal of the paper is to present a unique survey of the state-of-the-art image matching methods based on feature descriptor, from which future research may b

